Shader
Dec 16, 2024
16 mins read
Z-Buffer(深度缓存)
用来处理可见性问题,即确定每个像素最前层物体。
Frame Buffer(帧缓冲区:用于存储最终图像数据)、Depth Buffer(深度缓冲区:判断哪些物体在前,哪些物体被遮挡)
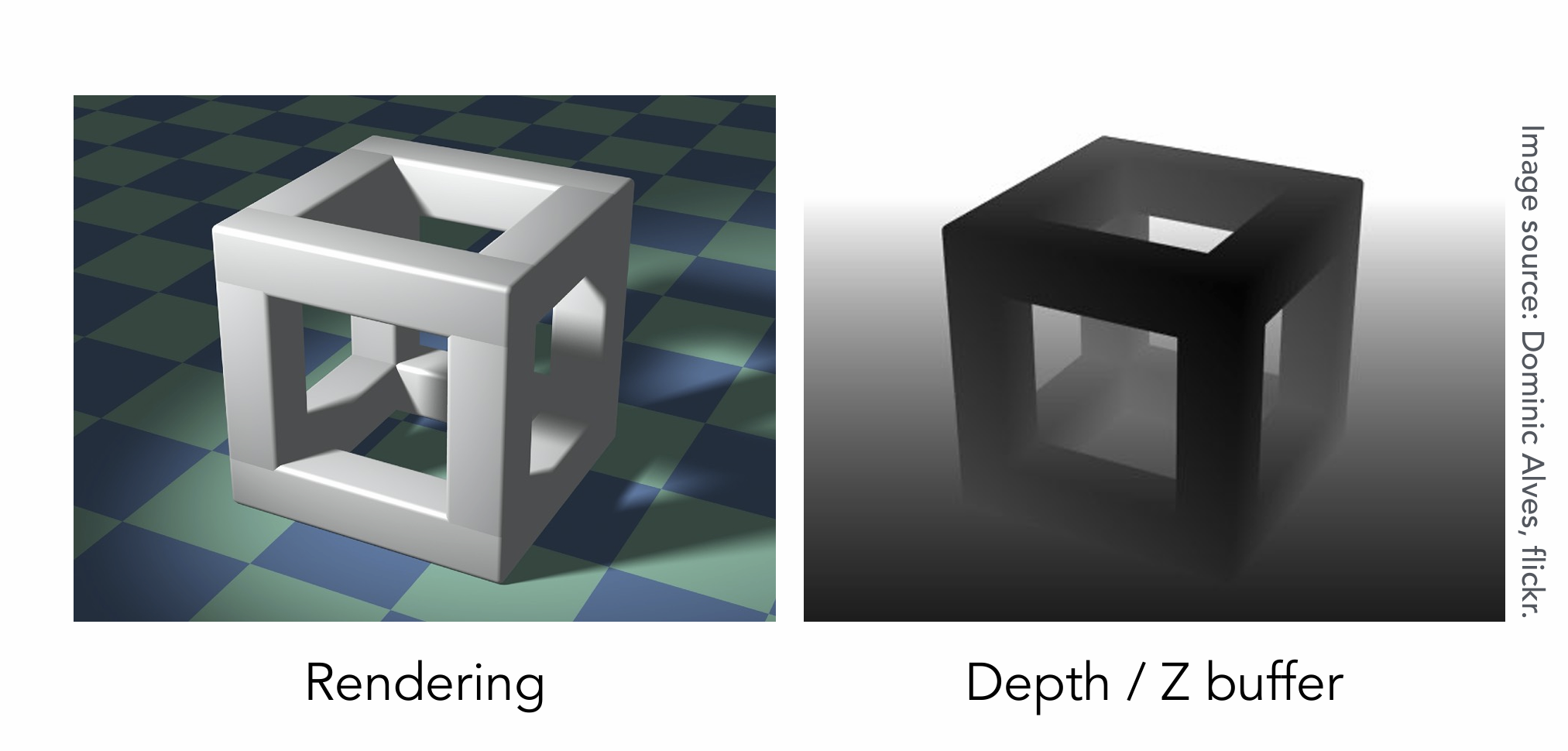
工作原理:近处是更黑的,远处是发白的。
Z-Buffer处理不了透明物体,透明物体需要特殊处理。
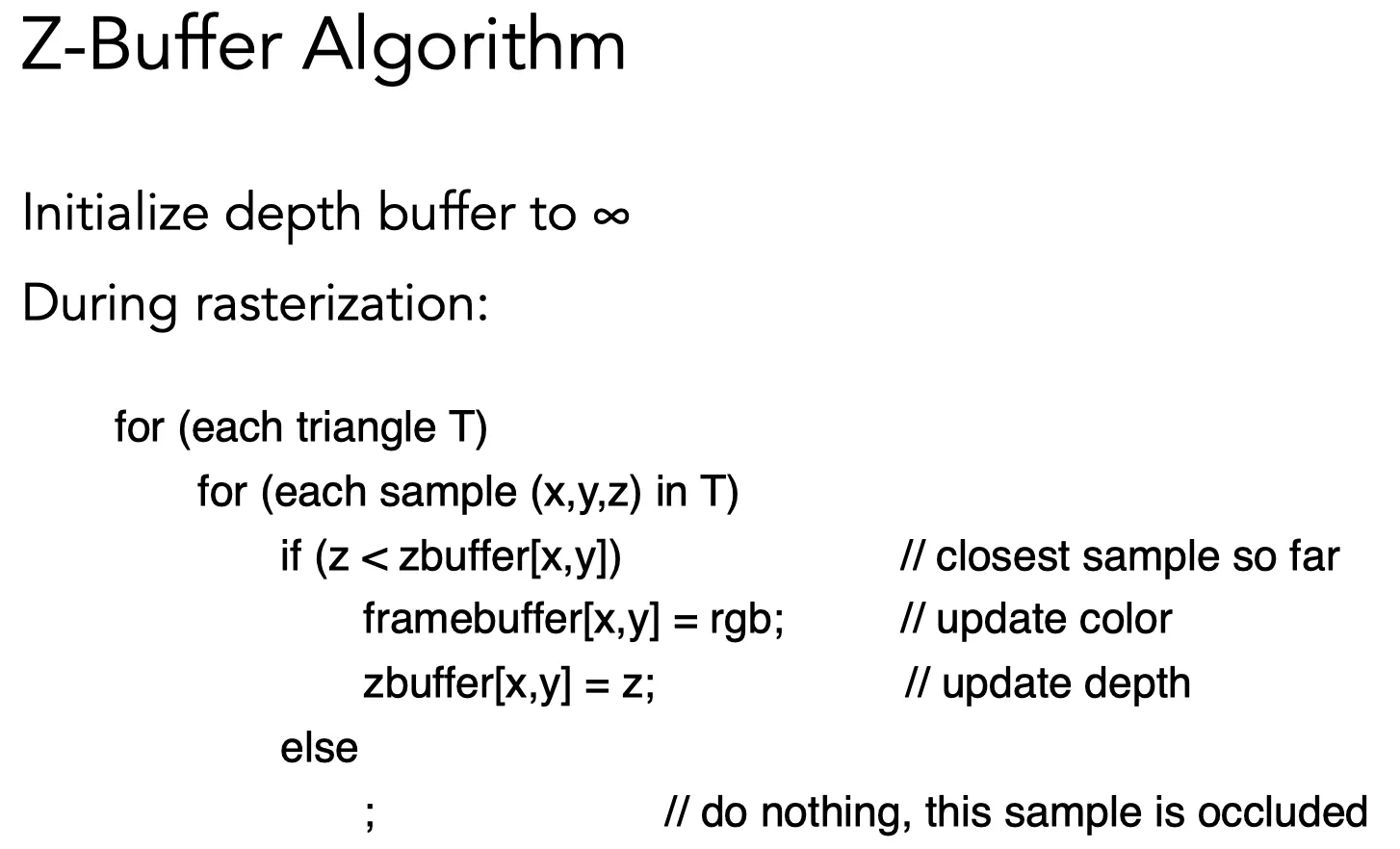
Z-Buffer Algorithm
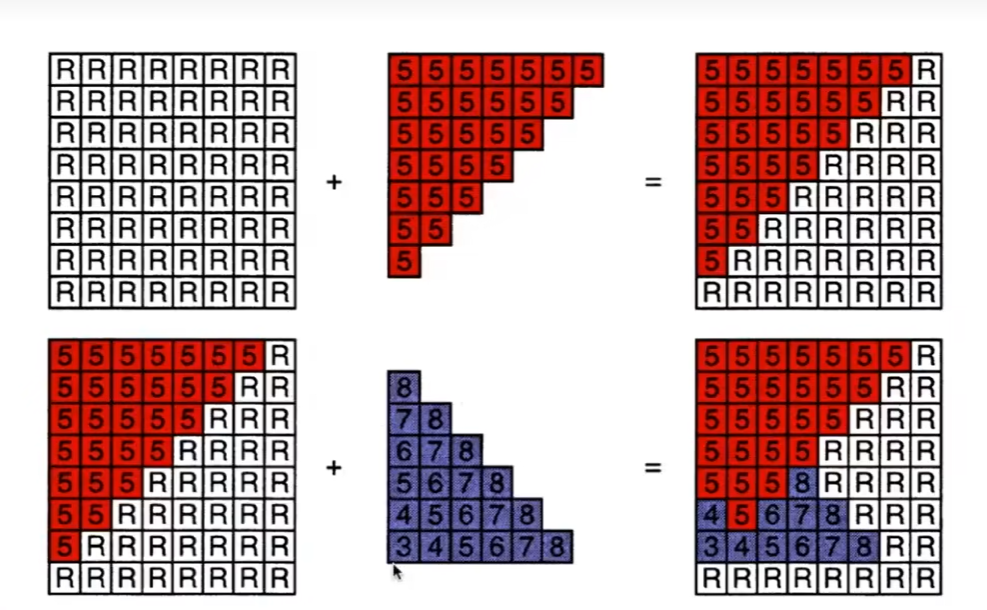
R代表无穷大,如果有三角形,就覆盖掉这些无穷大的像素
新的三角形深度是8 肯定要被原本三角形深度5所遮挡 所以就忽略它
如果新的三角形离的更近 更新这个像素对应的深度值
Z-Buffer复杂度 - O(n)
**Question:**为什么排序n个三角形是在线性的时间?
**Answer:**其实它不是排序,只是在对每个像素一直求最小值。
Shader
定义:对不同的物体应用不同材质的过程
物体在经过MVP(模型、视图、投影矩阵变换)、ViewPort之后现在我们会得到一系列旋转的立方体
需要对他做着色(Shading)
Blinn-Phong 反射模型
Blinn-Phong 反射模型是计算光照和表面反射的常用模型。它将光照分为三部分:
- 漫反射(Diffuse Reflection):表示光照与物体表面相互作用后,光线在不同方向上散射的现象,通常效果比较均匀,不会有明显的亮点。
- 镜面反射(Specular Highlights):表示光线被物体表面镜面反射的部分,产生亮光点,通常依赖于视角与光源方向的关系,产生较强的高光效果。
- 环境光照(Ambient Lighting):表示全局环境中的光照,通常是一个常量,作用于整个场景,不依赖于具体的物体或光源。
diffuse reflection
通常假设反射光是一个半球,并计算每个着色点(shading point)接收到的能量。漫反射的强度与光照方向和表面法线之间的夹角有关。
Lambert‘s cosine law:描述漫反射光照强度与光照方向和法线之间夹角的关系,公式如下:
$$ L_{d}=k_{d}\left(I / r^{2}\right) \max (0, \mathbf{n} \cdot \mathbf{l}) $$ $$ L_d:漫反射分量(反射光强度)\qquad k_d:漫反射系数(物体表面材质的属性)\qquad I:光源强度\qquad r:光源到表面点的距离 \qquad n:法线方向 \qquad l:光源方向 $$注意:漫反射不考虑其他物体的影响,只关注当前着色点的表面法线与光照方向的关系。
Specular Highlights
v和R足够接近的时候,会看到高光,其中v是观测方向,R是光线反射方向。
实际上是n法线方向和h半程向量很接近,利用平行四边形法则,可以求v+l向量,再求单位向量就是半程向量h。
镜面反射光的公式
$$ L_{s}=k_{s}\left(I / r^{2}\right) \max (0, \mathbf{n} \cdot \mathbf{h})^p $$
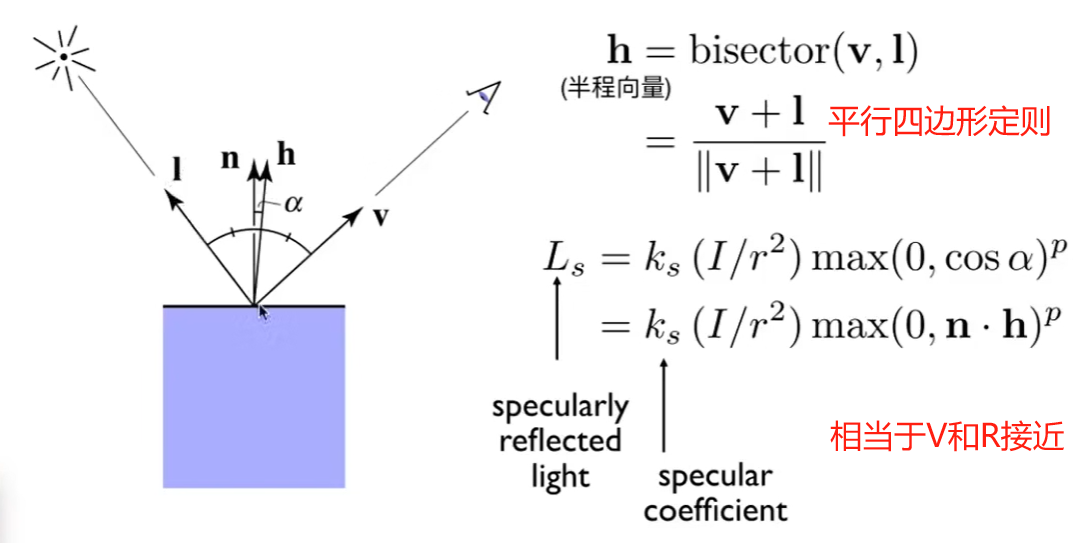
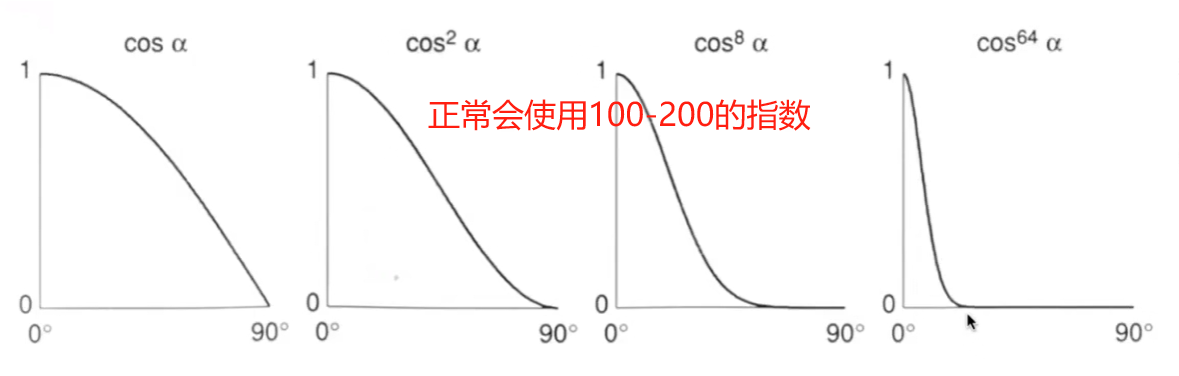
高光非常亮,且集中在一个很小的角度里,所以要有指数,将角度范围缩小,高光就会越来越小。
Ambient Lighting
环境光
$$ L_{a}=k_{a}I_{a} $$Blinn-Phong Reflection
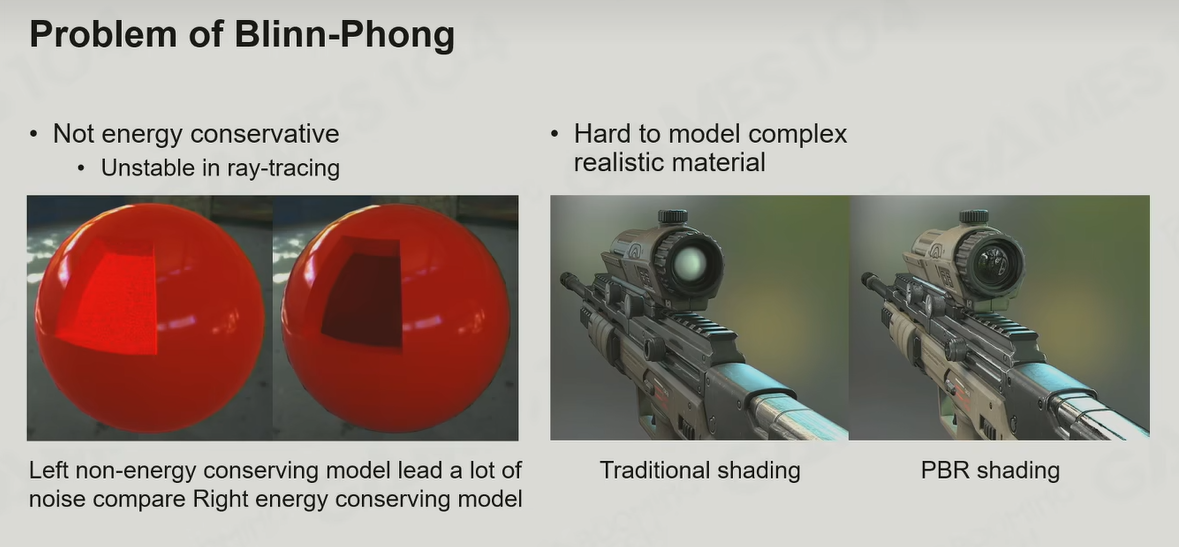
$$ L=L_{a}+L_{d}+L_{s} $$Problem of Blinn-Phong
ShadingFrequency
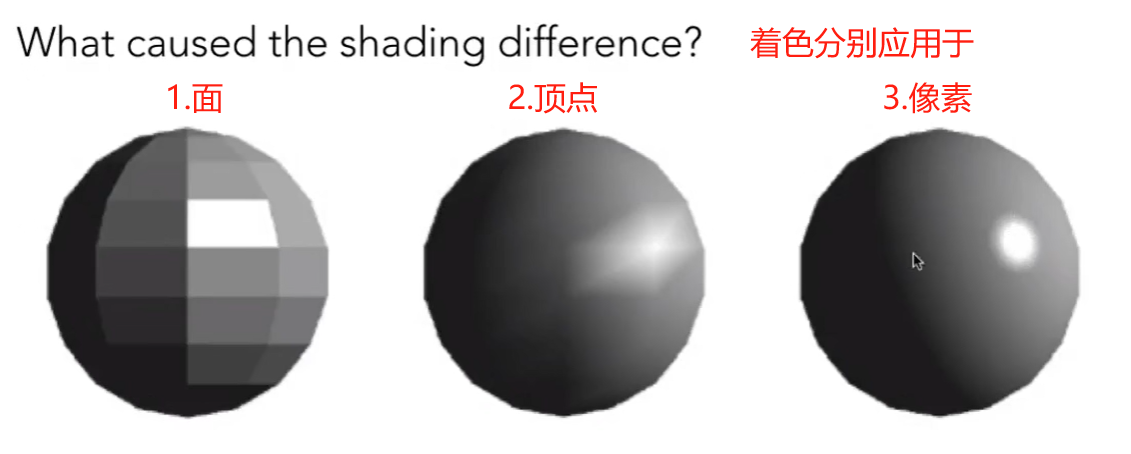
Phong shading(每个像素进行着色)
当几何模型的面数不断增加,着色频率也会增加,也可以使用FlatShading,但是取决于具体的物体,因为模型比较复杂的话,反倒可能会用phong shading会更好,但是大多数情况,选择phong shading是不会错的。
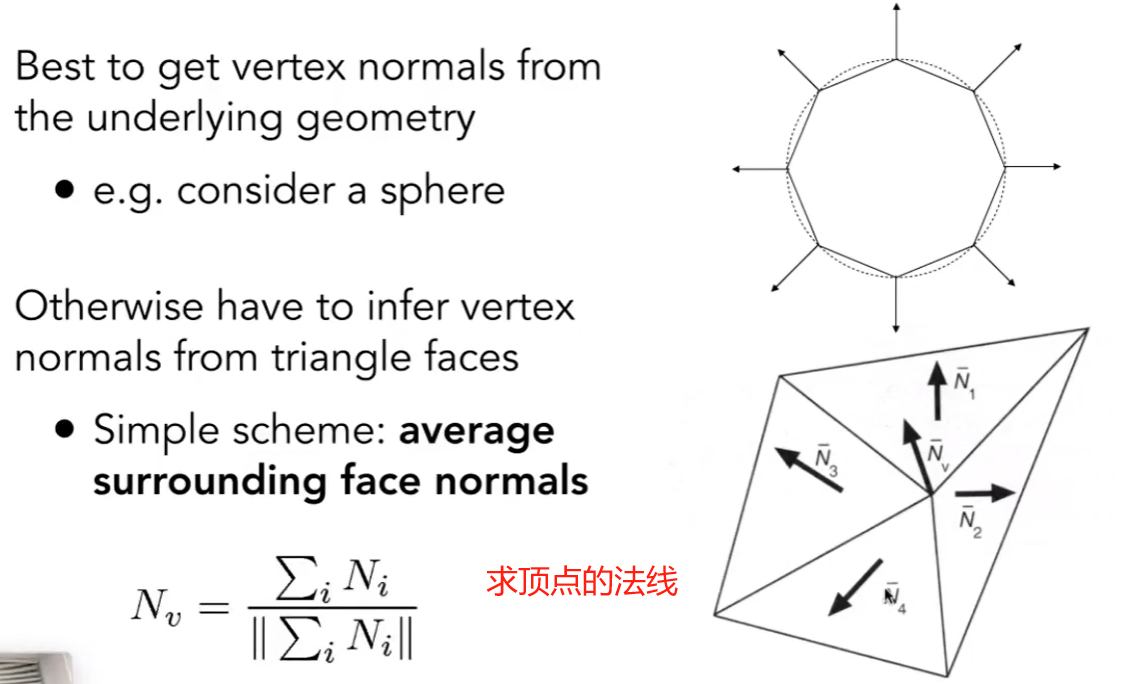
逐顶点求法线方向
当你知道一个模型对应的是什么物体的时候,你会通过下图(比如说有一个球形物体,和模型之间的接触的法线方向)
但是事实上你不知道模型是什么样的物体,于是只能通过计算每个平面的法线的平均值得到该点的法线方向,求加权平均值可能会得到更好的结果(面更大的求更大占比的法线方向向量),所有法线都要归一化。
Graphics Pipeline
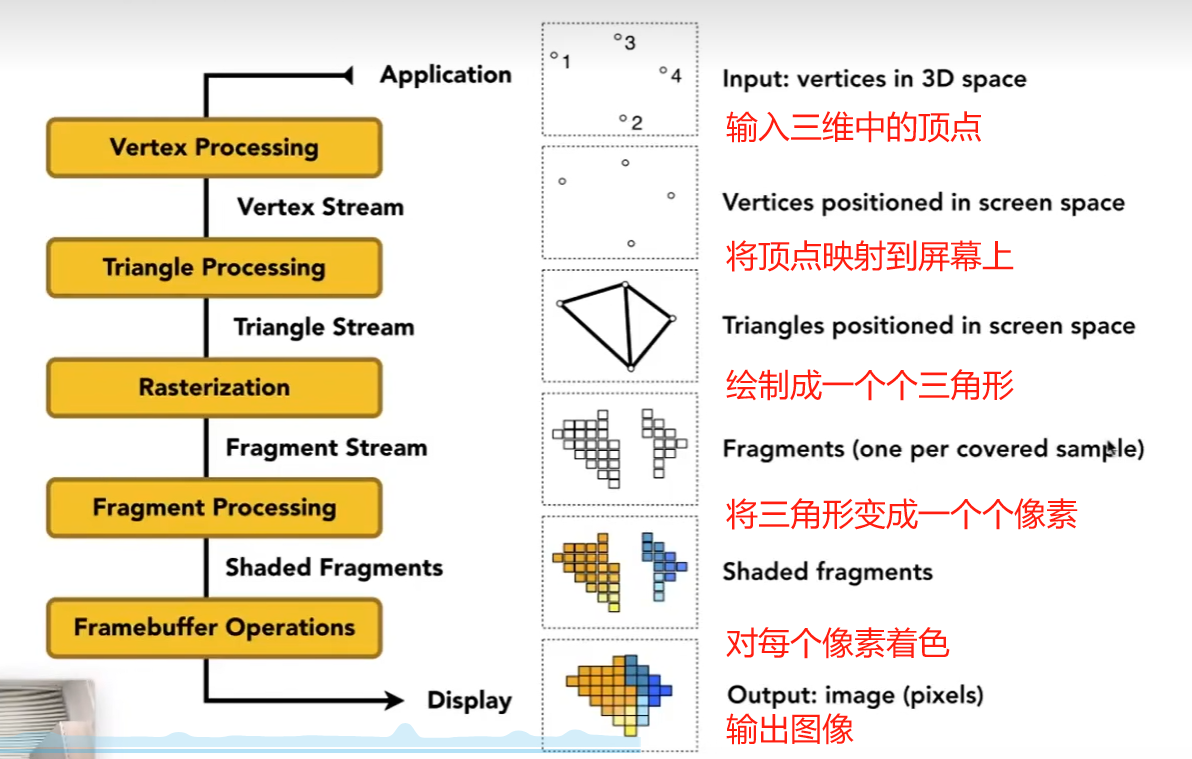
Shader概念
- shader是写一个通用的程序,只需要管一个像素怎么运作
- 如果操作一个顶点顶点着色器,如果操作一个像素像素(片源)着色器
分享一个网站Shadertoy BETA
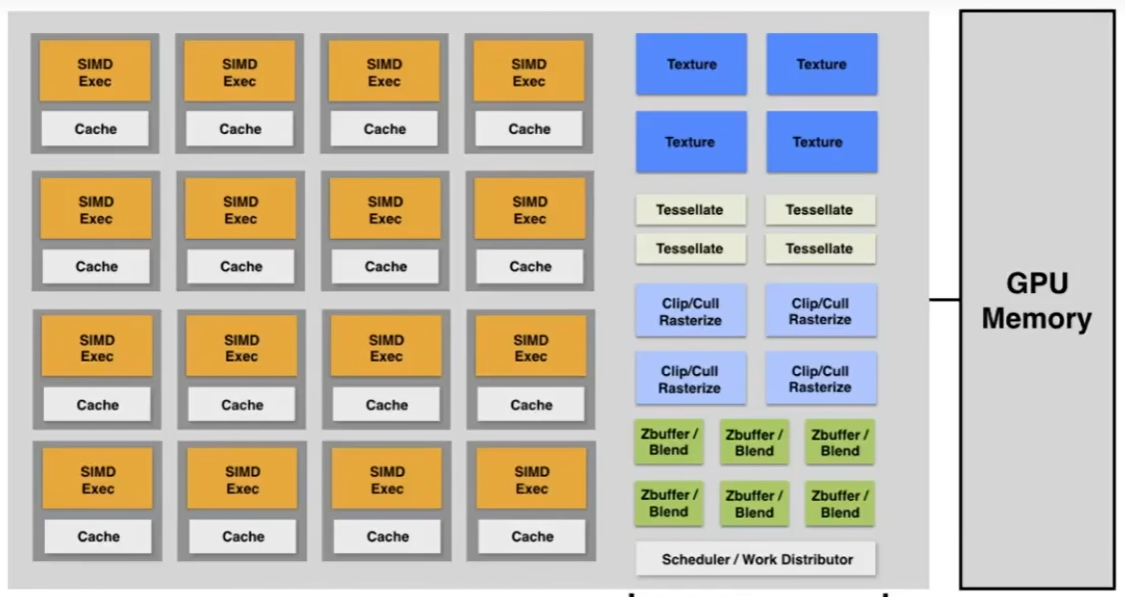
GPU
GPU 有成百上千个核心,这些核心被分为不同的小组,每一组可以执行不同 / 相同的人物,GPU的并行架构为处理大规模的相同类型操作而设计。
核心的数量 = 并行的数量,GPU并行度的速度远超过CPU的几十倍。
SIMD(Single Instruction, Multiple Data)是一种并行计算技术,它通过向量寄存器存储多个数据元素,并使用单条指令同时对这些数据元素进行处理,从而提高了计算效率。
Texture
比如说我们对一个物体求它在灯光下的漫反射,但是这个物体的材质是不同的,这个物体表面有不同的颜色,呢么它的漫反射系数也是不同的。所以我们需要知道物体的表面信息,引出纹理。
将一个三维物体贴到一个二维的平面。
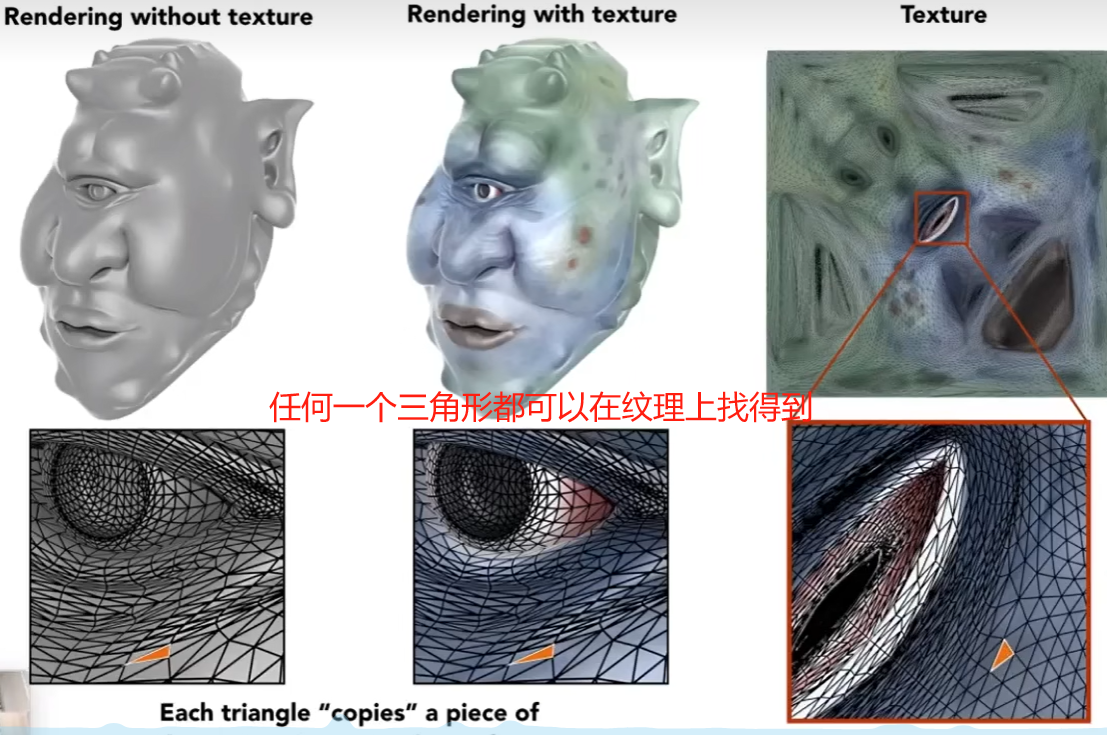
纹理的坐标系通常使用 U, V 来表示,横轴 U,纵轴 V。通常 UV 的范围是 [ 0, 1 ] 之内。
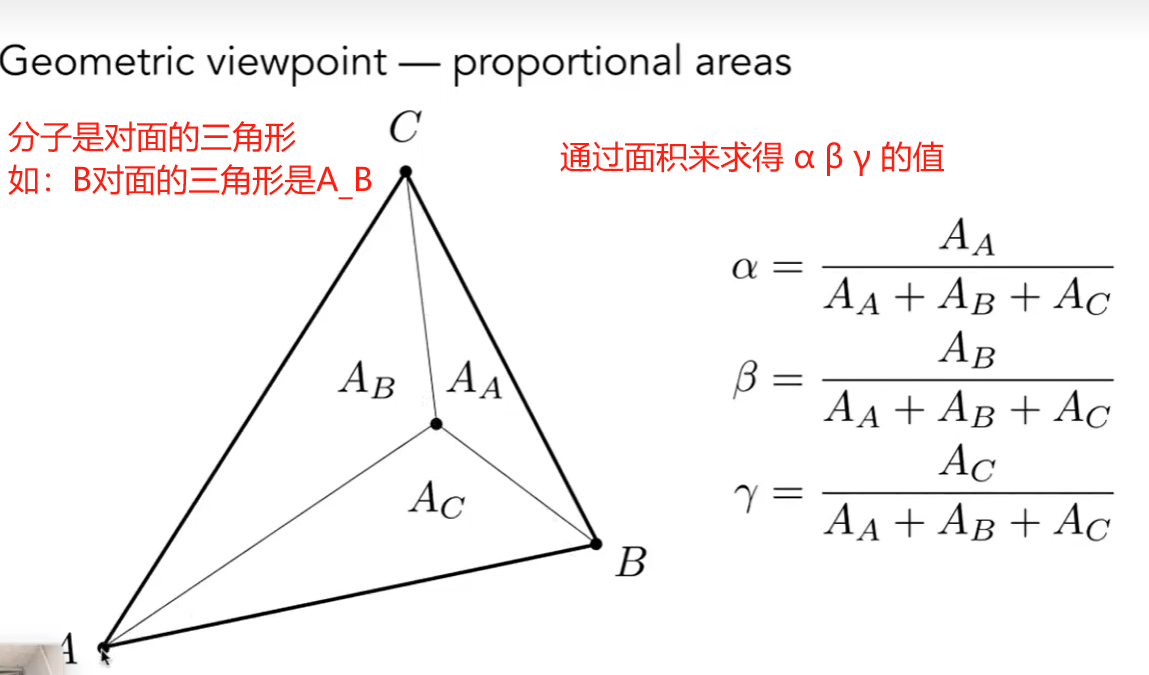
重心坐标
用重心坐标在三角形内部做任何形式的插值
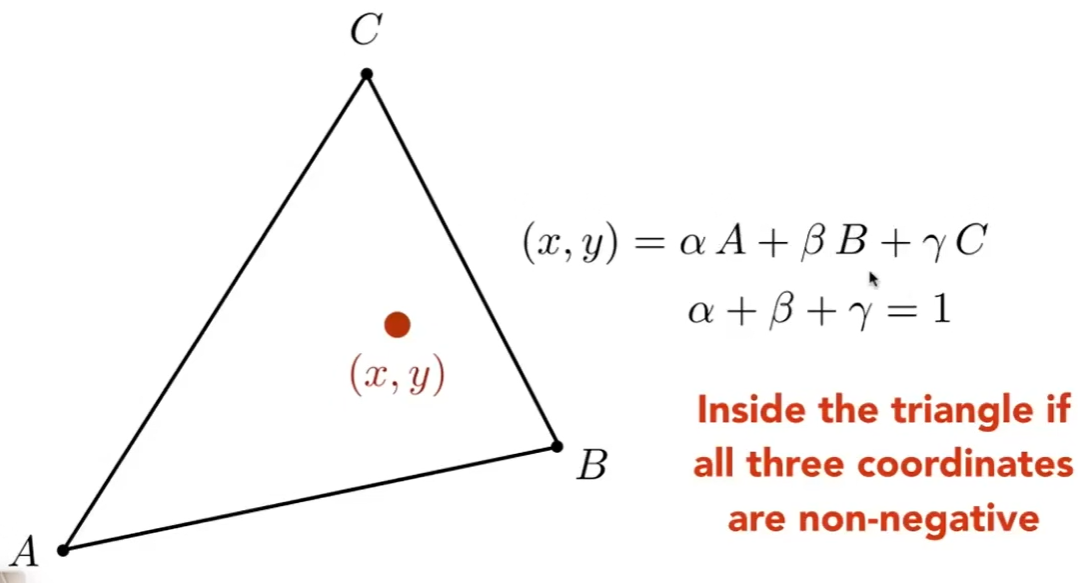
A点的重心坐标是(1,0,0) 因为αA+βB+γC = A
如果任意一点,它的中心坐标如下
注意:但是需要在三维中求重心坐标,如果在投影之后再求重心坐标,呢么结果会不准确,因为在投影前后的重心坐标从三维变二维是会发生变化的。
Texture Magnification(纹理映射)
纹理过小时引发的问题
比如说将一张100*100 分辨率的纹理贴图应用在500*500的屏幕上,必然会走样,因为屏幕上好几个像素点对应纹理UV坐标都是一样的,那么会变成低分辨率的图像,所以应该怎么做?
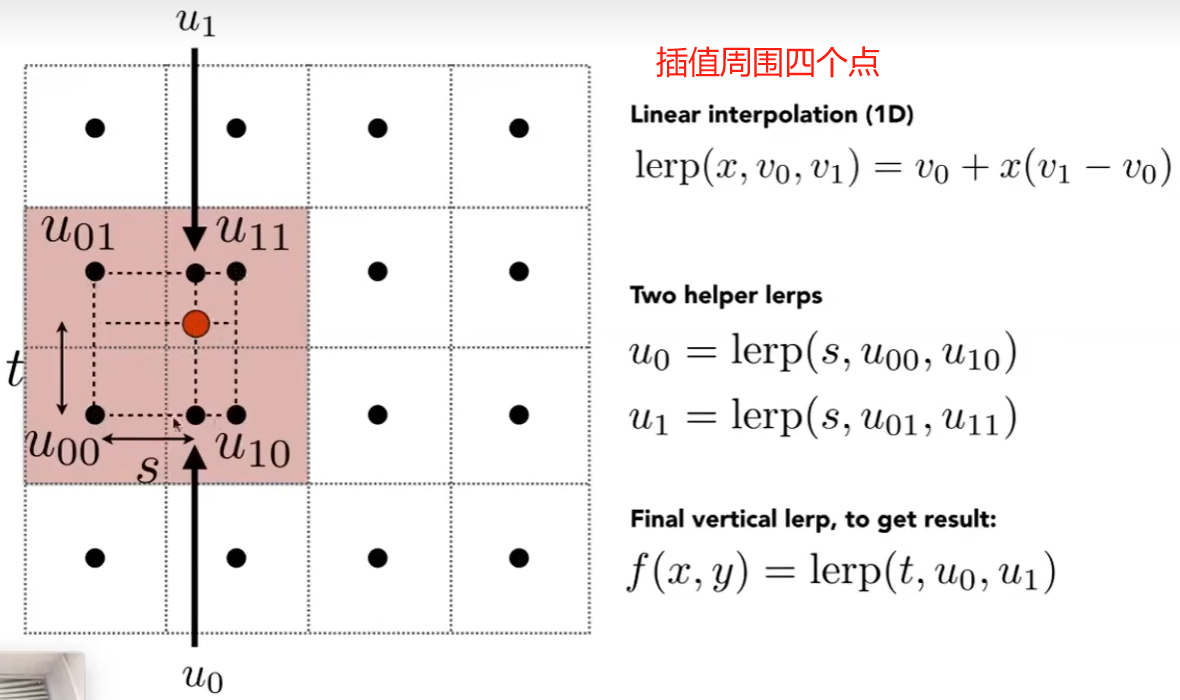
Bilinear Interpolation双线性插值
通过两次线性插值,来缓解走样的现象。
Bicubic 双三次插值
取周围16个像素,比Bilinear运算量大,但是带来了更好的结果。
Question:是否纹理大结果会更好?
Answer:No,反而麻烦会更大,由于屏幕空间一个点会对应纹理贴图中一大片点,所以会得到远处的摩尔纹和近处的锯齿(走样)。
Solution:一种直观的解决方法就是Supersampling(超采样),如果一个像素点不足以代表一个区域的颜色信息,那么便把一个像素细分为更多个小的采样点。但是代价十分的高,计算量特别巨大。
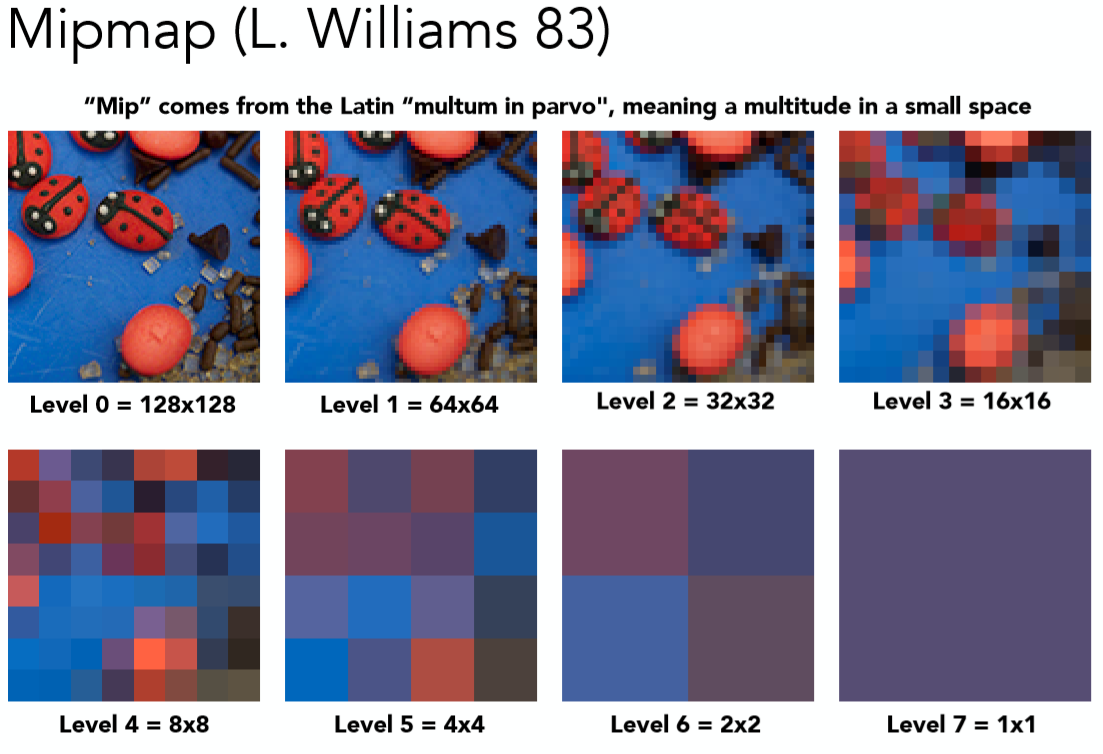
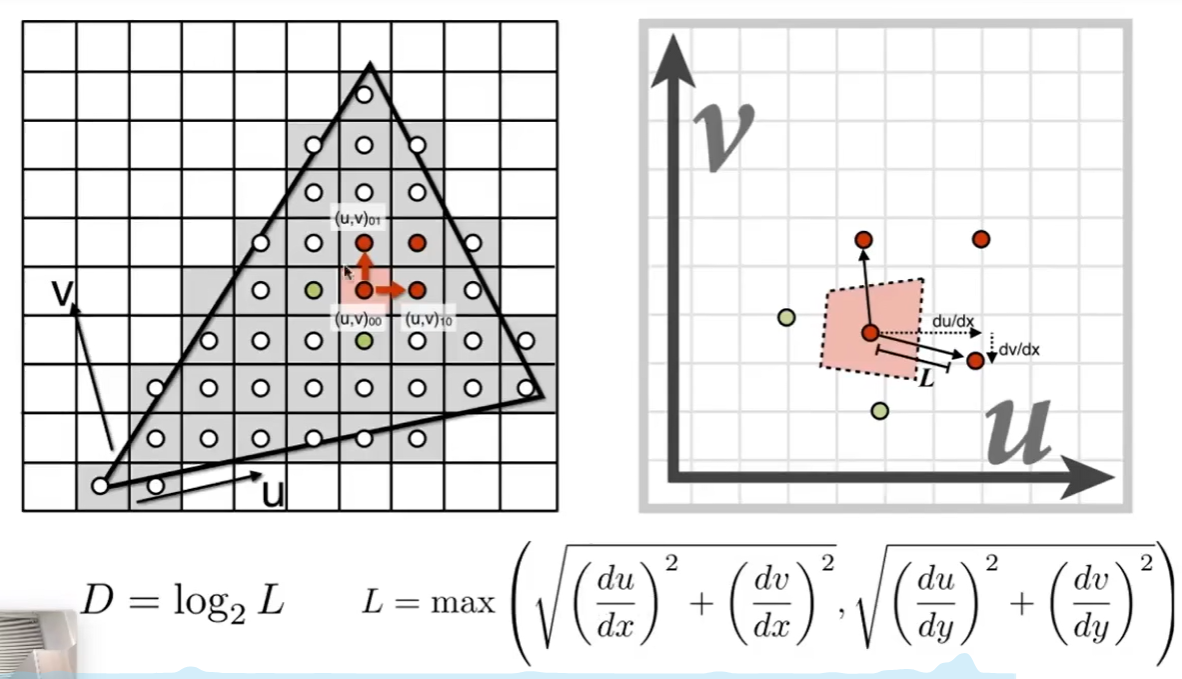
Mipmap 范围查询
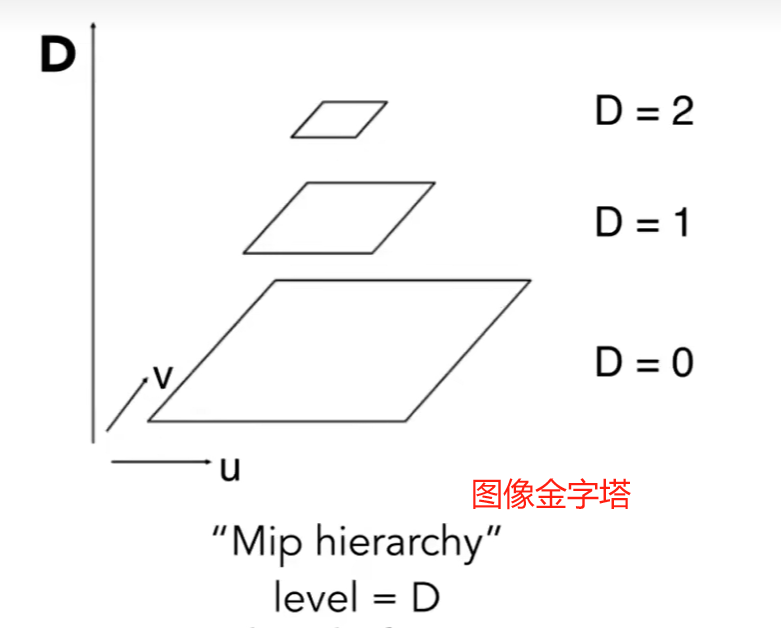
通过设置不同的Level值来查询不同精度的纹理。Level值越大像素点被合并的越少
作业
基于包围盒的光栅化,用三角形的重心坐标对颜色、法线、纹理坐标做插值。将插值传递给fragment_shader_payload,调用 fragment_shader 计算最终像素颜色
void rst::rasterizer::rasterize_triangle(const Triangle& t, const std::array<Eigen::Vector3f, 3>& view_pos)
{
auto v = t.toVector4();
int min_x = std::min(std::min(v[0].x(), v[1].x()), v[2].x());
int min_y = std::min(std::min(v[0].y(), v[1].y()), v[2].y());
int max_x = std::max(std::max(v[0].x(), v[1].x()), v[2].x());
int max_y = std::max(std::max(v[0].y(), v[1].y()), v[2].y());
for (int x = min_x; x <= max_x; x++)
{
for (int y = min_y; y <= max_y; y++)
{
if (insideTriangle(x + 0.5, y + 0.5, t.v))
{
auto [alpha, beta, gamma] = computeBarycentric2D(x + 0.5, y + 0.5, t.v);
float Z = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float zp = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
zp *= Z;
int cur_index = get_index(x, y);
if (zp < depth_buf[cur_index])
{
depth_buf[cur_index] = zp;
auto interpolated_color = interpolate(alpha, beta, gamma, t.color[0], t.color[1], t.color[2], 1);
auto interpolated_normal = interpolate(alpha, beta, gamma, t.normal[0], t.normal[1], t.normal[2], 1);
auto interpolated_texcoord = interpolate(alpha, beta, gamma, t.tex_coords[0], t.tex_coords[1], t.tex_coords[2], 1);
auto interpolated_shadingcoords = interpolate(alpha, beta, gamma, view_pos[0], view_pos[1], view_pos[2], 1);
fragment_shader_payload payload(interpolated_color, interpolated_normal.normalized(), interpolated_texcoord, texture ? &*texture : nullptr);
payload.view_pos = interpolated_shadingcoords;
auto pixel_color = fragment_shader(payload);
Vector2i vertex;
vertex << x, y;
set_pixel(vertex, pixel_color);
}
}
}
}
}
Blinn-Phong模型,计算漫反射、环境光反射、高光反射的值。

Eigen::Vector3f phong_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
Eigen::Vector3f result_color = {0, 0, 0};
for (auto& light : lights)
{
Eigen::Vector3f light_vector = (light.position - point).normalized();
Eigen::Vector3f view_color = (eye_pos - point).normalized();
Eigen::Vector3f half_vector = (light_vector + view_color).normalized();
Eigen::Vector3f n_vector = normal.normalized();
float r2 = (light.position - point).dot(light.position - point);
// cwiseProduct是逐元素相乘
Eigen::Vector3f la = ka.cwiseProduct(amb_light_intensity);
Eigen::Vector3f ld = kd.cwiseProduct(light.intensity / r2) * std::max(0.0f, n_vector.dot(light_vector));
Eigen::Vector3f ls = ks.cwiseProduct(light.intensity / r2) * std::pow(std::max(0.0f, n_vector.dot(half_vector)), p);
result_color += la + ld + ls;
}
return result_color * 255.f;
}

纹理贴图同上
if (payload.texture)
{
// TODO: Get the texture value at the texture coordinates of the current fragment
return_color = payload.texture->getColor(payload.tex_coords.x(), payload.tex_coords.y());
}
.png)
凹凸效果和位移贴图待更新…
Sharing is caring!